
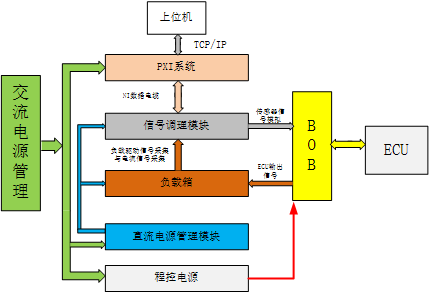
As a core active safety system of vehicles, the Electronic Stability Program (ESP) directly impacts driving safety through the functional completeness and reliability of its controller. To thoroughly validate ESP controller performance in a laboratory environment, we have developed an ESP integrated test bench based on hardware-in-the-loop (HiL) technology. The bench accurately simulates all necessary sensor signals for the ESP (such as wheel speed, yaw rate, lateral acceleration, steering angle, and master cylinder pressure) and forms a closed‑loop control system with the real ESP controller. It enables comprehensive functional testing, network communication testing, software/hardware release validation, and fault diagnosis without relying on an actual vehicle, providing a highly efficient and controllable environment for component verification.
The core of the test platform is built on the NI real‑time simulation system (e.g., PXI or cRIO series), running high‑fidelity vehicle dynamics and brake system models. The vehicle dynamics model is constructed using Siemens Amesim to accurately simulate longitudinal, lateral, and yaw motions under different road friction coefficients and driving conditions. The brake system model, also implemented in Amesim, includes the master cylinder, hydraulic control unit (HCU), and brake line characteristics, faithfully reproducing the pressurization, hold, and release dynamics of brake pressure.
To approximate real‑vehicle boundary conditions as closely as possible, the bench integrates an external physical ESP fixture and a customized ESP hydraulic piping system. This piping system follows the actual vehicle hydraulic circuit layout, connecting the HCU driven by the ESP controller to the four brake calipers. High‑precision pressure sensors installed at key nodes (e.g., master cylinder outlet, each wheel cylinder inlet) enable real‑time acquisition of true hydraulic pressures. Simultaneously, the brake caliper pressures are also sampled in real time and compared against target pressures to evaluate the ESP’s pressure closed‑loop control accuracy.
During test execution, the HiL system computes vehicle states based on driver and road models, then drives the ESP controller via simulated sensor signals. The ESP controller outputs hydraulic modulation commands to the physical HCU, which changes the brake caliper pressures. These pressures are fed back to the HiL system through sensors, updating the braking torques in the vehicle dynamics model—thus forming a complete hardware‑in‑the‑loop closure. All inter‑controller communications (e.g., CAN, CAN FD, LIN buses) can be monitored and emulated, supporting network fault injection and diagnostic tests.
This ESP HiL bench is suitable not only for routine functional verification (e.g., ABS, TCS, VDC, hill‑hold assist) but also for reproducing extreme conditions and sensor faults that are difficult to create in real vehicles, helping engineers quickly locate software and hardware issues. With automated test sequences and report generation, the system significantly shortens iteration cycles and provides a solid technical foundation for ESP product development and quality assurance.
