

This platform is a multi-ECU hardware-in-the-loop (HiL) test system designed for hybrid electric vehicle powertrains, aimed at validating and calibrating key hybrid system controllers and their communication networks. The platform fully simulates the hybrid powertrain architecture, covering core components such as the engine, drive motor, and transmission, and supports the development and testing of vehicle energy management and torque coordination control strategies.
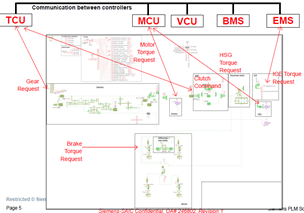
The platform integrates five main controllers: the Engine Management System (EMS) controls fuel injection, ignition, and air-fuel ratio; the Transmission Control Unit (TCU) executes shift logic and clutch/brake actuation; the Motor Control Unit (MCU) governs torque/speed output of the drive motor; the Battery Management System (BMS) master board monitors battery status, balancing, and safety protection; and the Vehicle Control Unit (VCU) acts as the high‑level decision‑making unit, coordinating mode switching, torque distribution, and regenerative braking among the EMS, TCU, MCU, and BMS.
The system adopts a distributed rack layout. Rack 1 integrates signal resources and power supply modules, providing essential I/O interfaces and stable power for all controllers. Rack 2 houses Break‑Out Boxes (BOB) with integrated bus valuation injection for signal break‑point measurement and fault injection, ECU power distribution and load simulation modules to meet the electrical requirements of different controllers, and the devices under test (EMS, TCU, MCU, BMS, VCU) for easy wiring and debugging.
The real‑time simulation core is built on the NI platform (e.g., PXI/e), running high‑fidelity vehicle models. The powertrain model is constructed using Siemens Amesim to accurately simulate the non‑linear dynamics of the engine, motor, battery, and driveline. I/O models are developed in Simulink for signal conditioning and mapping, enabling closed‑loop interaction with real controllers. The online calibration tool is INCAR, supporting CCP/XCP protocols, allowing real‑time observation and calibration of internal ECU parameters to accelerate control optimization and fault reproduction.
The communication system covers CAN, CAN FD, and LIN buses, emulating all key messages of the vehicle network to enable status exchange and command dispatch between the VCU and subordinate controllers. This HiL platform effectively reduces real‑vehicle testing costs and supports functional verification, network testing, fault diagnosis, and automated regression testing.
